Higher Pairs
Higher Pairs
INTRODUCTION:
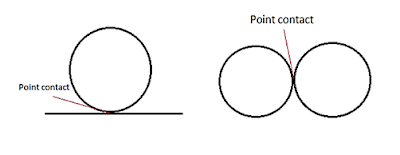
In The higher pair, only one point or line are responsible to form a joint between two links. The elements of higher pair must have curve in its shape. These joints are found in the cylinders or spheres of equal or different radius which have their axis parallel to each other. A cylinder or sphere lying on a flat surface has a point Contact and makes a higher pair. The relative motion of cam and follower makes a point Contact between them. The point of contact between two involute gear meshing makes a higher pair. These are some basic examples to explain the higher pair better.
When the two elements of a pair have a line or point contact when relative motion takes place and the motion between the two elements is partly turning and partly sliding, then the pair is known as higher pair.
Examples of higher pair:
A pair of toothed gearing, belt and rope drives, ball and roller bearings and cam and follower are the examples of higher pairs.
1] Belt and rope drive:

The belts or ropes are used to transmit power from one shaft to another by means of pulleys which rotate at the same speed or at different speeds. The amount of power transmitted depends upon the following factors:
- The velocity of the belt.
- The tension under which the belt is placed on the pulleys.
- The arc of contact between the belt and the smaller pulley.
- The conditions under which the belt is used. It may be noted that
- The shafts should be properly in line to insure uniform tension across the belt section.
- The pulleys should not be too close together, in order that the arc of contact on the smaller pulley may be as large as possible.
- The pulleys should not be so far apart as to cause the belt to weigh heavily on the shafts, thus increasing the friction load on the bearings.
- A long belt tends to swing from side to side, causing the belt to run out of the pulleys, which in turn develops crooked spots in the belt.
- The tight side of the belt should be at the bottom, so that whatever sag is present on the loose side will increase the arc of contact at the pulleys.
- To obtain good results with flat belts, the maximum distance between the shafts should not exceed 10 meters and the minimum should not be less than 3.5 times the diameter of the larger pulley.
Selection of a Belt Drive Following are the various important factors upon which the selection of a belt drive depends:
- Speed of the driving and driven shafts,
- Speed reduction ratio,
- Power to be transmitted,
- Centre distance between the shafts,
- Positive drive requirements,
- Shafts layout,
- Space available,
- Service conditions.
Types of Belt Drives:
The belt drives are usually classified into the following three groups:
1. Light drives. These are used to transmit small powers at belt speeds up to about 10 m/s, as in agricultural machines and small machine tools.
2. Medium drives. These are used to transmit medium power at belt speeds over 10 m/s but up to 22 m/s, as in machine tools.
3. Heavy drives. These are used to transmit large powers at belt speeds above 22 m/s, as in compressors and generators.
Types of Belts

- Types of belts. Though there are many types of belts used these days, yet the following are important from the subject point of view:
1. Flat belt. The flat belt, as shown in Fig.(a), is mostly used in the factories and workshops, where a moderate amount of power is to be transmitted, from one pulley to another when the two pulleys are not more than 8 meters apart.
2. V-belt. The V-belt, as shown in Fig. (b), is mostly used in the factories and workshops, where a moderate amount of power is to be transmitted, from one pulley to another, when the two pulleys are very near to each other.
3. Circular belt or rope. The circular belt or rope, as shown in Fig.(c), is mostly used in the factories and workshops, where a great amount of power is to be transmitted, from one pulley to another, when the two pulleys are more than 8 meters apart.
If a huge amount of power is to be transmitted, then a single belt may not be sufficient. In such a case, wide pulleys (for V-belts or circular belts) with several grooves are used. Then a belt in each groove is provided to transmit the required amount of power from one pulley to another.
2] Toothed gearing:
Friction Wheels The motion and power transmitted by gears is kinematically equivalent to that transmitted by friction wheels or discs. To understand how the motion can be transmitted by two toothed wheels, consider two plain circular wheels A and B mounted on shafts, having sufficient rough surfaces, and pressing against each other as shown in Fig.

Let the wheel A be keyed to the rotating shaft and the wheel B to the shaft, to be rotated. A little consideration will show, that when the wheel A is rotated by a rotating shaft, it will rotate the wheel B in the opposite direction as shown in Fig. 2.1 (a). The wheel B will be rotated (by the wheel A) so long as the tangential force exerted by the wheel A does not exceed the maximum frictional resistance between the two wheels. But when the tangential force (P) exceeds the frictional resistance (F), slipping will take place between the two wheels. Thus, the friction drive is not a positive drive. 2.1 (b), are provided on the periphery of the wheel A, which will fit into the corresponding recesses on the periphery of the wheel B. A friction wheel with the teeth cut on it is known as toothed wheel or gear. The usual connection to show the toothed wheels is by their pitch circles.
Note: Kinematically, the friction wheels running without slip and toothed gearing are identical. But due to the possibility of slipping of wheels, the friction wheels can only be used for transmission of small powers.
Advantages and Disadvantages of Gear Drive The following are the advantages and disadvantages of the gear drive as compared to belt, rope and chain drives:
Advantages
1. It transmits exact velocity ratio.
2. It may be used to transmit large power.
3. It has high efficiency.
4. It has reliable service.
5. It has compact layout.
Disadvantages
1. The manufacture of gears requires special tools and equipment.
2. The error in cutting teeth may cause vibrations and noise during operation.
3] Cam Mechanism:
When the two links are connected either along a line or at a point, it is called a higher pair. Two such higher pair mechanisms will be included in a cam-follower system. A higher pair mechanism is known as cam and follower.
For the smooth
functioning of a cam- follower mechanism, it is imperative that the follower
should move smoothly without requiring too much input power, which means the
follower should not jam, during its movement.
In an IC engine
the valves have to be kept open; first, then close it and keep it closed, all
these timing operations can be easily set by having cam-follower mechanisms.

Cam and Follower Advantages:
1.
Cam and follower bearing are that they always
distribute evenly, regardless of the configuration of the unit.
2.
A wide range of linear motions is available from
cams and followers.
3.
Cam follower can absorb more shock than normal and
can reduce distortion.
4.
They are highly versatile.
Cam and Follower Disadvantages:
1.
Backlash between the cam-follower and the cam.
2.
This must be stopped to prevent much damage when
there is a crashing of the machine.
3.
More expensive to manufacture and machine require
greater precision.
4.
The negative radius of curvature is not possible.
Cam and Follower Application:
1.
Feed mechanism in lathe machine.
2.
Inlet and exhaust valve of the IC engine.
3.
Jigs and fixtures.


👍👍👍
ReplyDeleteVery informative 👍
ReplyDeleteVery informative
ReplyDelete👍🏻👍🏻👍🏻👍🏻👍🏻
ReplyDeleteVery useful information!!
ReplyDelete👍👍
ReplyDeletegreat job guys!
ReplyDeleteVery Informative! 👍